



{kind=link}
Gliders
Introduction
Gliders are a class of Autonomous Underwater Vehicles (AUVs) which are changing the way oceanographers study the ocean (Fig. 1). Gliders collect high resolution measurements of ocean properties with just a few technicians or "pilots" who work from their offices, instead of requiring many scientists, engineers, and crew and chartered time on expensive ships. They move slowly through the ocean depths, surfacing every few hours to download their most recently collected data and to receive new mission programs if desired.
A Glider's Flight
The gliders operate by changing their buoyancy and center of gravity to fly through the ocean. Buoyancy changes are made by pumping oil in and out of a diaphram in the nose cone of the glider; when seawater is sucked in through the holes in the nose cone, the glider becomes heavier and sinks. Simultaneous to the incorporation of the seawater, a motor inside the glider turns a screw which moves a battery towards the nose cone inside the forward hull section of the glider (Fig. 2). The result of moving the heavy battery forward is to change the pitch, or dive angle, of the glider from neutral to -26 degrees. The glider's forward motion overcomes the forces of drag on the glider, and since it has wings, it begins to slide forward through the water at a target velocity of 15 cm/s.
Once the glider reaches its preprogrammed target depth, it reverses the operation, ejecting seawater from the nose cone and moving the pitch battery towards the tail of the glider. The glider climbs back up to the surface and completes a zig-zag or yo motion. Since very little battery power is used to move the pitch battery or to pump oil, the gliders can operate autonomously for about one month on a single set of alkaline batteries or up to two months on lithium batteries.
Communication and Navigation
The gliders surface every so often (six hours in our case) and inflate an air bladder in their tail to elevate antennaes built into the rudder assembly (Fig. 3). Inside the tail fin are three antennae - one for receiving GPS position signals, one for two-way comminications with the Iridium Satellite network, and one for emergency communications with the ARGOS network. When the command to surface is given and the the glider is on the surface, it grabs a position fix from the GPS and compares it with its dead-reckoned position (an estimate based on its compass heading and speed through water). The glider's autopilot function remembers how off course it is based on the difference between the two positions and compensates for the offset during its next dive cycle.
In addition to making its course corrections, the glider calls into a server that is run at the University of Alaska Fairbanks. Glider Mission Control software running on the server checks to make sure the glider is OK. If the glider is having problems, pilots are notified immediately and may have to take over the glider operation manually. Normally, the gliders are happy and send all their newly collected science data back to the server, along with position and system health information such as battery voltage and leak detect voltages. Pilots can upload new missions to the server; when the gliders surface, hours later, they will grab the new mission programs and change their course to swim to new waypoints. If no new missions have been uplaoded, then the gliders continue on their pre-programmed missions and await the next command to surface.
Measurements
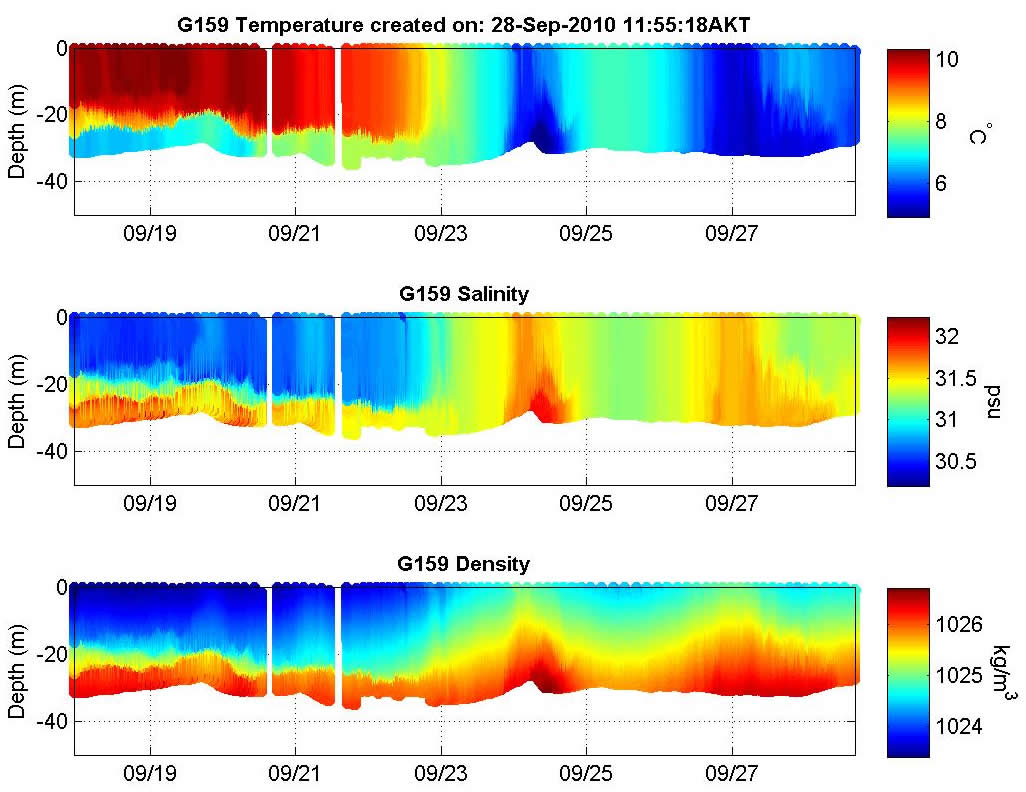
The gliders are equipped with standard oceanographic sensors which measure water conductivity, temperature, and pressure (Fig. 4). Two of our gliders are equipped with optical sensors which measure the fluorescence of particles after they are excited by specific wavelengths of light. The fluorometers are used to quantify the amount of Chlorophyll, Chromorphic Dissolved Organic Matter (CDOM) and backscattered light. More recently, one of our gliders has been retrofitted to operate with a spectro-photometer which measures the excitation/emission spectra from a variety of wavelengths to determine the concentration of Nitrate, an extremely important compound for the biology of the world's oceans.